文章內容

2019自駕車用高精地圖國際研討會深入報導

2019自駕車用高精地圖國際研討會在台北舉行,討論主題包括:臺灣高精地圖發展、自駕車用動態地圖、車圖合一介接與整合、高精地圖與自駕車應用,邀請包括成功大學、臺灣大學等學術單位,車輛測試中心、工研院資通所、資策會智慧運輸系統中心等研究單位,以及TomTom、Dynamic Map Platform (DMP)、興創知能、台灣智慧駕駛、艾德斯、緯創資通、車聯網產業協會等民間企業組織共襄盛舉,本文將深入介紹所有與會專家分享的內容,並且針對台灣自駕車用高精地圖的發展做評析。
❐ 臺灣高精地圖發展
成功大學江凱偉教授分享關於如何利用感測器融合(Sensor fusion)收集陀螺儀(IMU)、車輪感測(Wheel sensing)、全球衛星定位系統(GPS)、光達(Lidar),再結合高精地圖(HD map),如圖一所示,台灣高精地圖結合驗證後的點雲(Point cloud)與向量地圖(Vector map)轉為OpenDrive+extension檔案格式即可以提供精準的自動駕駛進行。
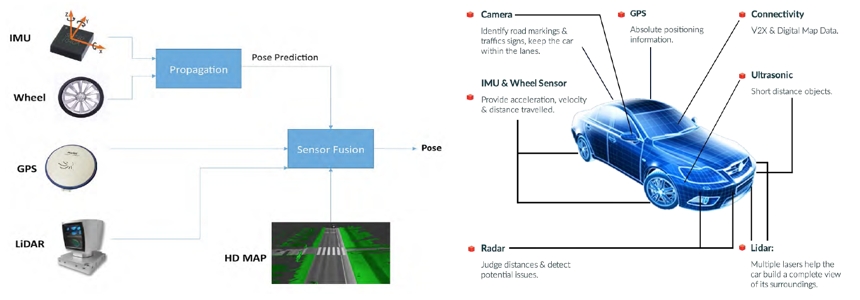
圖一 如何利用感測器融合(Sensor fusion)收集資訊進行自動駕駛。
資料來源:成功大學江凱偉教授簡報。
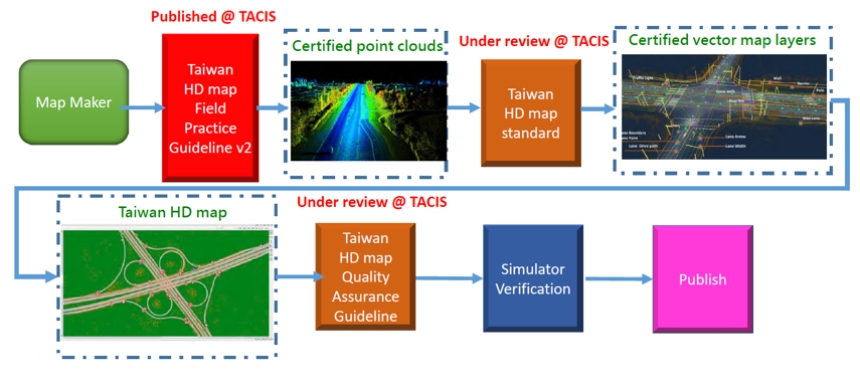
比較亞洲地區主要國家的高精地圖,日本與韓國的絕對精確度要求水平方向為25公分(cm),3D立體方向為35公分,而台灣的絕對精確度要求水平方向為20公分(cm),3D立體方向為30公分,顯然台灣的要求高於亞洲其他先進國家。要產生高精地圖,必須由地圖產生者參考高精地圖圖資內容標準(草案)與高精地圖驗證指引(草案),製作點雲(Point cloud)與向量地圖(Vector map),再經由檢核程序確認品質與模擬驗證後才能公開。
未來台灣動態高精地圖的運作,可以經由驗證過的自駕車或團隊收集資訊,經由動態高精地圖平台整理包括動態資料、統計資料、高精地圖等,圖資公司進行內容更新包括資料收集、資料處理、資料公開等,最後將所有資料上傳雲端平台與邊緣雲端伺服器,動態提供自駕車下載使用,如圖二所示。
圖二 台灣動態高精地圖的運作流桯。
資料來源:成功大學江凱偉教授簡報。
自駕車在平面道路行駛比飛機在天空飛行還要複雜得多,主要由於平面道路經常變動使得環境較為複雜,道路使用者可能會干擾自動駕駛系統,除此之外,汽車製造商很多,設備供應商也不同,每家廠商的技術水準不同,而且不同國家道路法規可能沒有統一等,因此要將航空安全標準用在自駕車上有許多挑戰,只使用全球衛星導航系統(GPS)是不夠的,必須使用大量感測器來輔助。飛機只有在起飛與降落時會有較高的風險,可預測性比較高,但汽車在地面上時時刻刻都有風險,可預測性比較低。
成功大學洪榮宏教授分享關於高精地圖所需資訊的收集與處理,自駕車需要的資訊分為靜態(Static)小於一個月、擬靜態(Quasi-static)小於一小時、擬動態(Quasi-dynamic)小於一分鐘、動態(Dynamic)小於一秒鐘改變內容等四個階層,如圖三所示,這些資訊包括由汽車傳送出來的訊號,例如周圍車輛動態、行人動態、交通號誌時間等,目前交通狀況資訊,例如交通事故、道路擁塞情況、天氣狀況等,計畫行駛道路,例如:交通號誌預測、天氣預測等,才能結合基本高精地圖資訊。而主要的挑戰來自於自駕車產業的需求多樣化,不同廠商之間的資料格式不同,不同廠商收集類似資料會浪費資源,因此必須思考如何使廠商彼此之間分享資料?
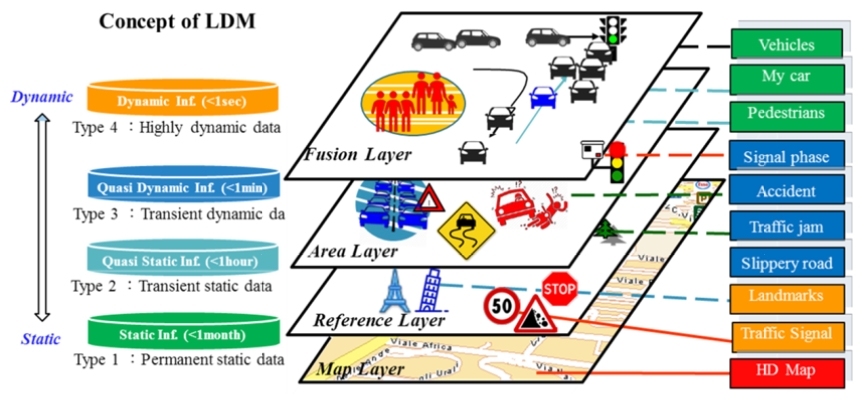
圖三 自駕車需要的資訊等級示意圖。
資料來源:成功大學洪榮宏教授簡報。
建立高精地圖標準的主要策略則是必須有良好的定義、開放的資料格式、遵守國際標準、支援台灣的交通系統、未來的環境造成的可擴展性等來建立「台灣資訊與通訊標準(TAICS:Taiwan Association of Information and Communication Standards)」,道路的點雲(Point clouds)與形態檔案(Shape files)使用OpenDrive + extension格式,建立整個自駕車產業,如圖四所示。以OpenDrive XML標準為例,使用「統一塑模語言(UML:Unified Modeling Language)」架構,道路心須分割為道路單元,所有的特徵必須依照道路單元設計,擴展特徵使用者資料單元來記錄,包括交通號誌與標誌,車道上的交通標線、斑馬線,資料的運用包括車道選擇(Land section)與路口交接(Junction)等。
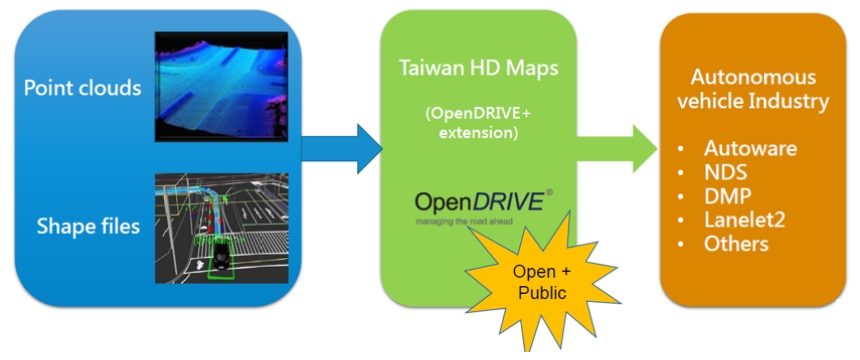
圖四 台灣建立高精地圖標準的主要策略。
資料來源:成功大學洪榮宏教授簡報。
❐ 自駕車用動態地圖
Civil Maps公司的施良經理介紹為什麼自駕車需要高精地圖,主要由於資訊在地化是自駕車成功的第一步,在大量的背景資訊中必須分離出主要車道的訊息,再進一步得到主要車道更精密的資訊,例如車道被其他車輛佔用,或是變更車道的可行性等,提供Altas 2.0 Civil Maps Mapping Kit開發板讓使用者更容易收集與處理高精地圖資訊,並且以開發San Francisco的高精地圖為例,實際的應用案例除了自駕車導航,還有即時邊緣地點顯示,地圖方向導引等。
DMP公司的田島總監介紹他們公司如何收購GM汽車旗下的Ushr公司取得了美國與加拿大的高速公路地圖,目前擁有全球35萬公里的高速公路與86萬公里非高速公路的高精地圖,並且成功導入日產汽車(Nissan ProPILOT 2.0),其中還包括診斷路面人孔蓋的劣化情形,相關道路設施的管理,並且支援道路鏟雪需要的資訊等。
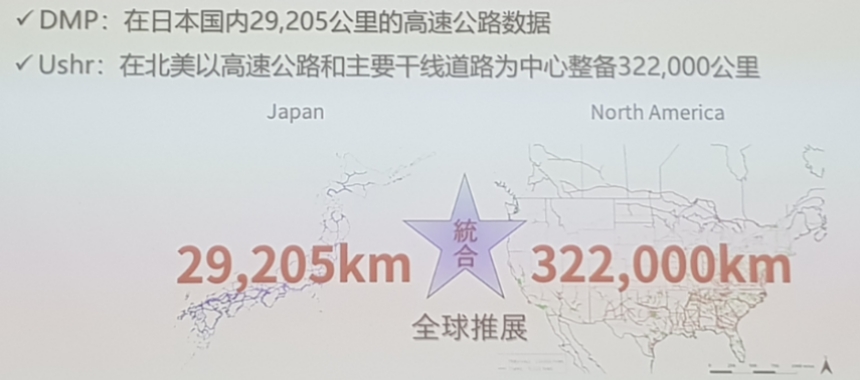
圖五 DMP公司收購Ushr公司取得了美國與加拿大的高速公路地圖。
資料來源:DMP公司的田島總監。
❐ 「車圖合一」介接與整合
成功大學莊智清教授指出,愈是高等級的自駕車系統,與基礎建設的關係愈重要,而高精地圖正是不可或缺的基礎建設,我們可以說「高度的自動駕駛是由高精地圖來啟動的(Highly automated driving is enabled by HD maps)」,高精地圖和自駕車緊密相關,應該以相互建設性的方式來發展形成一個迴路,先有自駕車行駛取得道路資訊,再將資訊進行分析,結合其他方式取得的地形地貌建立高精地圖,如圖六所示,而自動駕駛有賴於汽車與雲端的通訊連結,動態高精地圖也必須具有即時更新的功能,此外,會議中還介紹了成功大學自行開發的智慧駕駛功能與後端系統。
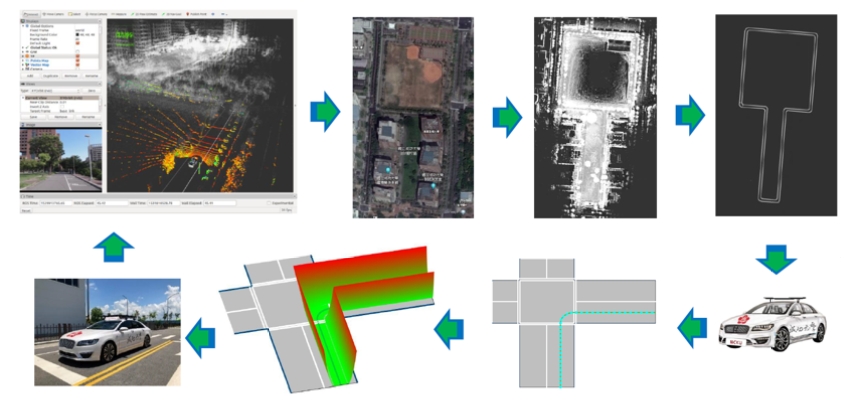
圖六 高精地圖和自駕車緊密相關。
資料來源:成功大學莊智清教授簡報。
財團法人車輛研究測試中心莊嶸騰副理在說明中提到,高精地圖主要包括點雲地圖(Point cloud map)和向量地圖(Vector map),點雲地圖主要是由感測器偵測到的數據,向量地圖則是道路模型與道路兩旁的物件,高精地圖資訊連結到自駕車上的感知模組(Perception module)、決策模組(Decision module)、定位模組(Localization module),提供自駕車必要的地圖資訊:
➤感知模組(Perception module):經由影像感測器與高精地圖的協助偵測動態「興趣區域(ROI:Range of Interest)」,同時分辨交通號誌,與交通號誌沒有通訊的情況下必須能夠分辨目前的燈號,如圖七所示。
➤決策模組(Decision module):高精地圖的資訊包括道路與車道資訊,決策模組經由「戴克斯特拉演算法(Dijkstra algorithm)」決定要行駛的道路,這是從一個頂點到其餘各頂點的最短路徑演算法,解決的是有向圖中最短路徑問題,再經由車道資訊計算出可以行駛的車道。
➤定位模組(Localization module):基於點雲資訊可以決定自駕車的位置,在三度空間中點雲被分割為立體像素(Voxel),系統可以利用自駕車的位置資訊與最接近的環境資訊,並且參考車道標線與路邊特徵等資訊決定位置是否正確。

圖七 興趣區域(ROI)取得示意圖。
資料來源:財團法人車輛研究測試中心莊嶸騰副理簡報。
❐ 高精地圖與自駕車應用
艾德斯科技溫峻瑜董事長分享先進駕駛輔助系統(ADAS:Advanced Driver Assistance Systems)相關知訊,其中等級零(Level 0)到等級二(Level 2)屬於先進駕駛輔助系統(ADAS)而等級三(Level 3)到等級五(Level 5)屬於自動駕駛(AD),Intel與Mobileye開始測試他們的自動駕駛系統「道路經驗管理(REM:Road Experience Management)」,主要步驟包括:訊號收集、訊號加密、訊號聚合、訊號傳送、車輛控制,如圖八所示,相關的資訊包括「統計層(Static layer)」與「動態資料(Dynamic data)」,目前在日本已經擁有25000公里的道路測試經驗。
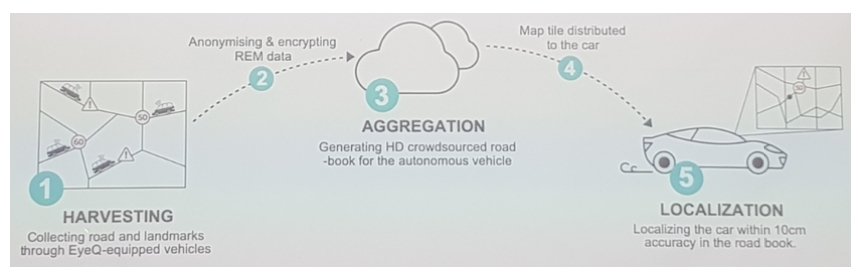
圖八 道路經驗管理(REM)主要步驟示意圖。
資料來源:艾德斯科技溫峻瑜董事長簡報。
緯創資通張國欽資深經理分享自動駕駛的中央控制操作(OCC:Operation Central Control),會議中提到針對中央政府、縣市政府等都有許多痛點與需求,車輛管理與即時遠端監控,必須定義感測器資料型態與屬性,操作流程包括:感測器資料載入、感測器與地圖資料轉換、高精地圖升級、高精地圖調度等,所有資料由中央控制操作管理室控制,可以進行人工智慧(AI)與機器學習(ML),以及擴增實境(AR)研究與測試、車輛事故管理、智慧交通管理、車隊操作管理、高精地圖動態服務等,最終的目標是建立一個友善與安全的操作基礎建設,如圖九所示。
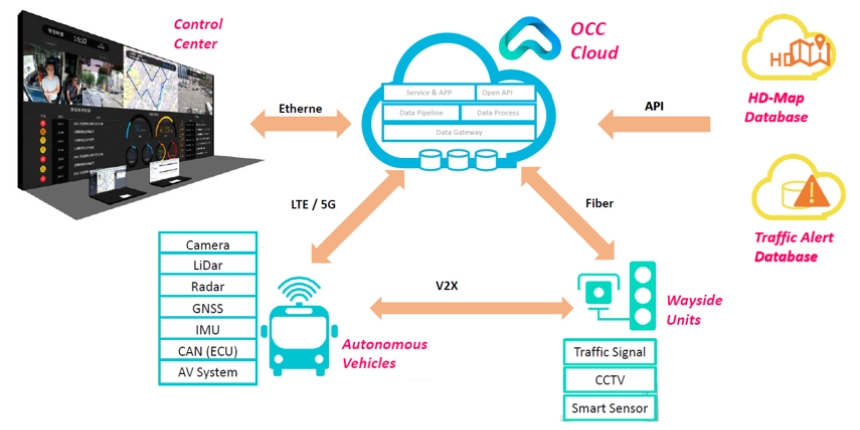
圖九 友善與安全的操作基礎建設項目。
資料來源:緯創資通張國欽資深經理簡報。
❐ 高精地圖研究發展中心引導台灣自駕產業發展
自動駕駛技術是近年來重要的發展方向,結合5G與物聯網、車聯網、人工智慧等技術的成熟,再加上政府單位、民間廠商全力投入,相信不久就會看到成果,而自駕車成功的基本要件就在高精地圖,因此內政部地政司委託國立成功大學成立「高精地圖研究發展中心」與「高精地圖產學研資訊交流平台」,整合國內外技術和資訊,推動高精地圖建置流程和評估標準,促進產官學界合作,發展基於高精地圖之自駕車應用,中心提供的服務如圖十所示。
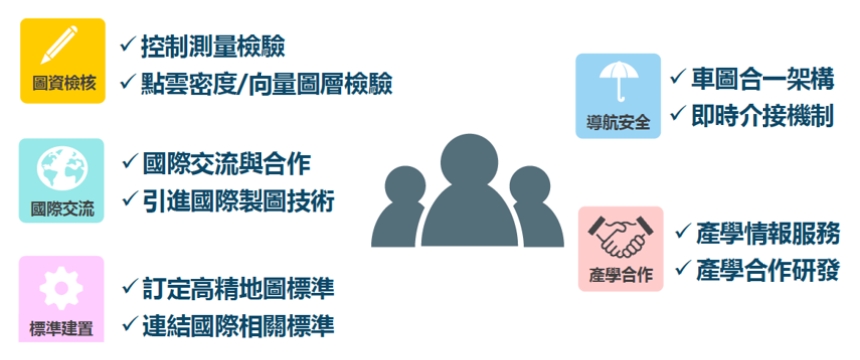
圖十 高精地圖研究發展中心提供的服務。
資料來源:高精地圖研究發展中心簡報。
高精地圖研究發展中心協助國內外發展內容包括:內政部推動高精地圖相關計畫、建立產官學研交流平台、協助國際交流與合作、引進國際製圖技術;協助高精地圖事務內容包括:高精地圖標準規範與諮詢、高精地圖圖資檢核與諮詢、高精地圖適用性與數據內容評估、高精地圖需求研究與實證;自動駕駛技術內容包括:高精地圖於自駕車資通訊系統整合開發、自駕車導航安全性能評估、動態訊息與數據交換格式研發等。
【文章圖示】成功大學高精地圖研究發展中心。